
SFB1574 Circular Factory
- Contact:
- Partner:
Karlsruhe Institute of Technology, University of Stuttgart
- Startdate:
07/2024
Lifelong Learning for Autonomous Versatile and Flexible Robotic Grasping System in the Circular Factory
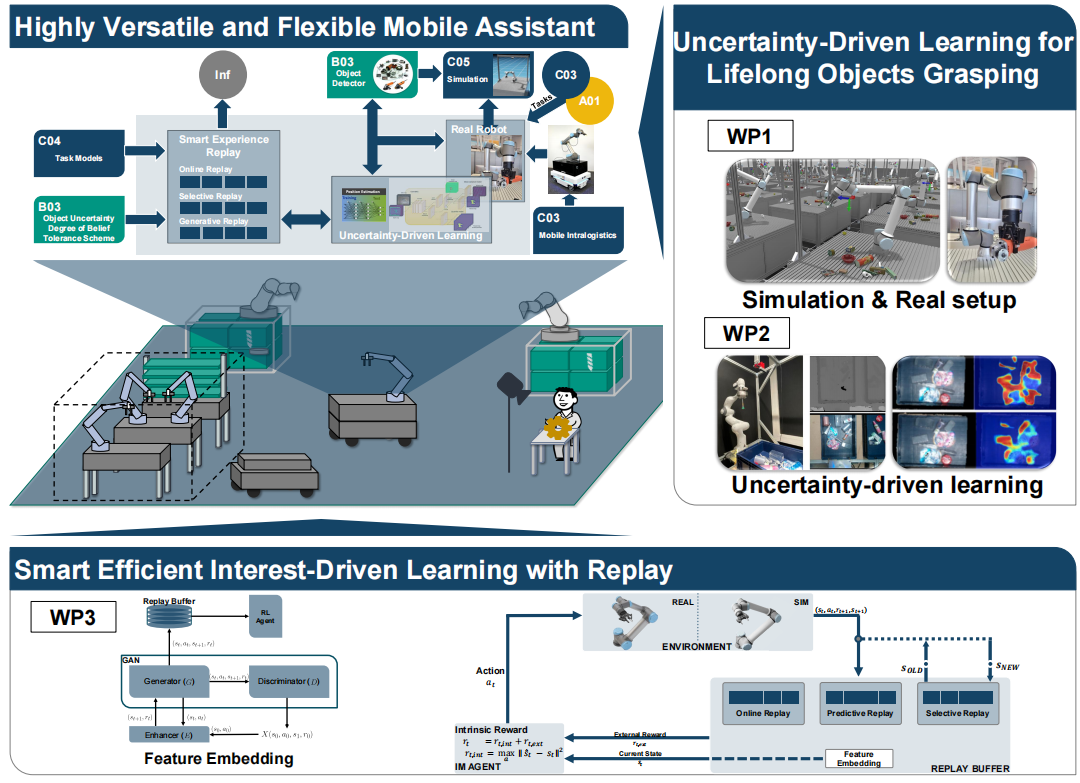
Motivation
The circular factory envisions a production system that is highly flexible and adaptable, powered by intelligent robotic resources. Unlike traditional industrial robots designed for repetitive tasks in structured environments, the circular factory requires robots that can handle the high uncertainty of deformed, used, and new components of the product from different product generations, which vary widely in shape, texture, and material properties, existing in a dynamic and unstructured environment. To address this challenge, robots must be capable of continuous learning to adapt and optimize their skills over time, a concept known as lifelong learning, which enables robots to acquire new skills and knowledge, facilitating their adaptation to changes in tasks, hardware, and environments throughout their operational lifetime.
Goals
The main goal of this subproject C06 is to develop a lifelong grasp learning system for intralogistics handling and manipulation tasks. We strive to ensure fast and robust handling of unknown-state objects to create a responsive material handling system. Together with C03, the aim is to deliver fully automated, versatile, adaptive mobile assistants. For this purpose, a lifelong learning system is being designed to enable direct online learning on the real robot to facilitate continuous adaptation for handling variations in object characteristics effectively. To this aim, autonomous exploration-exploitation decision-making based on uncertainty-driven methods is being established to balance learning and task execution effectively. Moreover, optimizing computational and resource costs will be accomplished by designing efficient learning models and smart replay strategies.