UNICARagil - Autonomous passenger transport and parcel deliveries of the future
- Contact:
- Project Group:
- Funding:
Funded by the BMBF within the funding priority "Disruptive vehicle concepts for autonomous electric mobility" (Auto-Dis).
- Partner:
Universities:
RWTH Aachen
TU Braunschweig
TU Darmstadt
Karlsruher Institute of Technology (KIT)
TU München
University Passau
University Stuttgart
University UlmIndustry partners:
ATLATEC GmbH
flyXdrive GmbH
iMAR Navigation GmbH
IPG Automotive GmbH
Maxion Wheels Germany Holding GmbH
Schaeffler Technologies AG & Co. KG
Valeo Schalter und Sensoren GmbH
VIRES Simulationstechnologie GmbH - Startdate:
02.2018
- Enddate:
01.2022
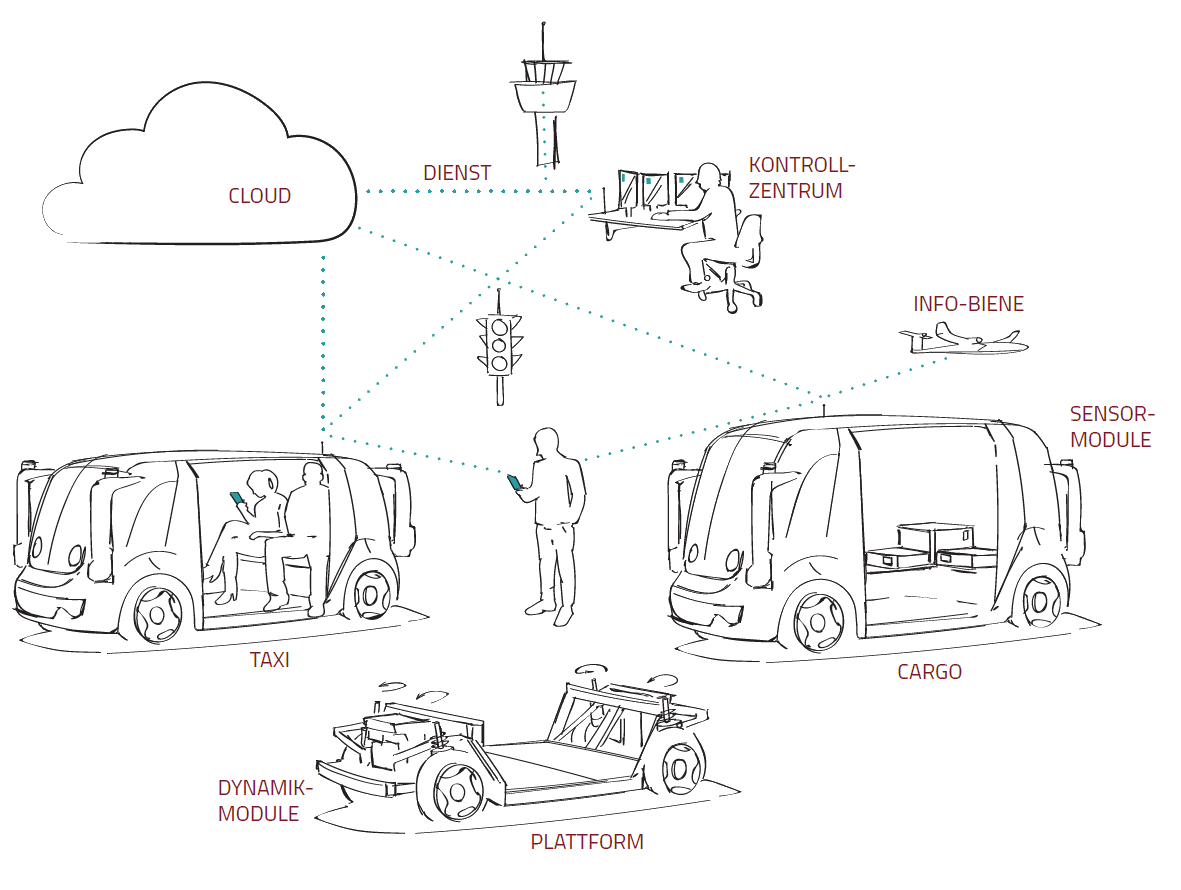
Sketch of complete system, reference: unicaragil.de

Autonomous, electric vehicles will be the essential building block of the mobility of the future: they create the basis for sustainable and intelligent road traffic, innovative mobility and transport concepts, improvements in traffic safety and an increase in the quality of life in urban areas.
As part of the UNICARagil research project, four autonomous vehicles with different characteristics will be built:
- autoTAXI,
- autoSHUTTLE (local public transport),
- autoELF (private vehicle) and the delivery vehicle
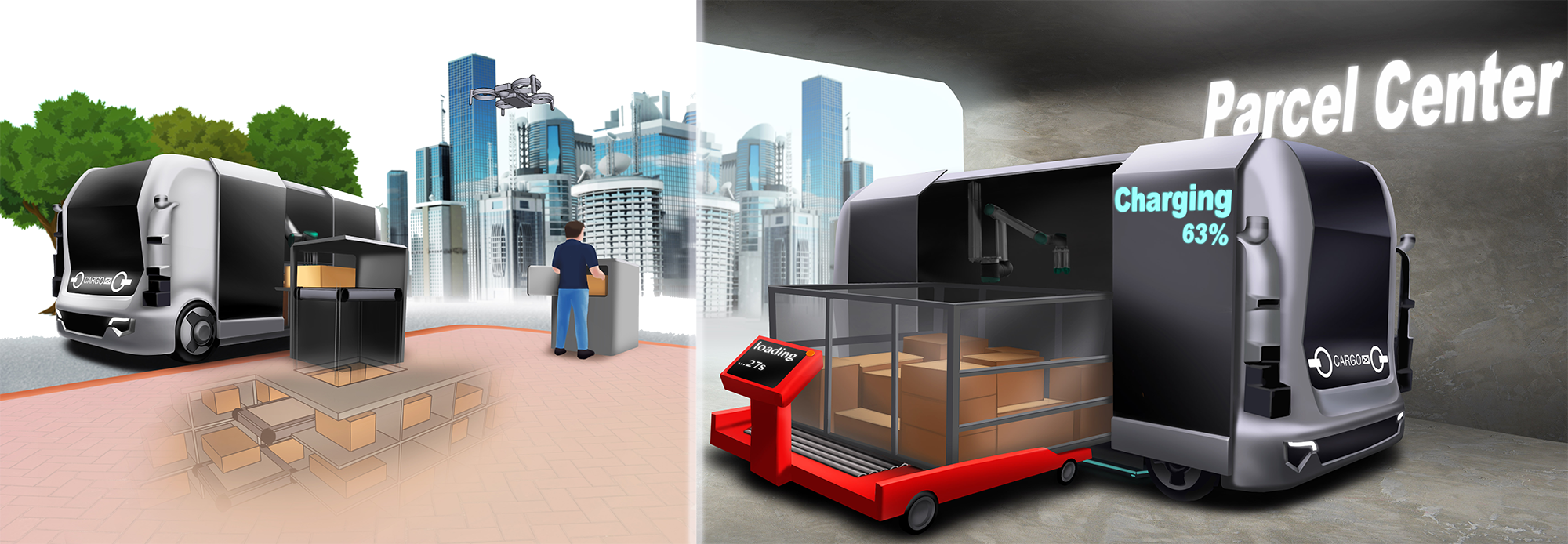
- autoCARGO for autonomous parcel delivery. Thereby, the ride as well as the entire collection and delivery process will take place autonomously.

Together with the Institute of Measurement and Control Technology (MRT) at KIT, the handling technology sensors are implemented, AUTOliefer will be tested and the overall system will be validated.
In the UNICARagil project, the latest results of research into electromobility and automated and networked driving are used to develop autonomous electric vehicles for a wide variety of future application scenarios. Bonds from the IT industry with their rapid development cycles and update mechanisms are used. The basis is a modular and scalable vehicle concept, consisting of useful and drive units, which can be flexibly adapted to a wide variety of applications in logistics and passenger transport. The core element of the research and development work is the functional vehicle architecture, which is networked with the cloud, the road infrastructure and so-called information bees (drones as flying sensor clusters). Further focal points are the development of generic sensor modules for environment detection, a flexibly expandable and updatable software and hardware architecture as well as dynamic modules for individual steering, driving and deceleration of individual wheels, which allow completely new forms of movement in road traffic.
The project started on February 1, 2018 and will run for 4 years. It is supported by the Federal Ministry of Education and Research as part of the funding priority "Disruptive vehicle concepts for autonomous electric mobility" (Auto-Dis). Members of the consortium are: RWTH Aachen, TU Braunschweig, TU Darmstadt, Karlsruhe Institute of Technology (KIT), TU Munich, University of Stuttgart, University of Ulm and University of Passau as well as the following industrial partners ATLATEC GmbH, flyXdrive GmbH, iMAR Navigation GmbH, IPG Automotive GmbH, Schaeffler Technologies AG & Co. KG, VIRES Simulationstechnologie GmbH, Valeo Schalter und Sensoren GmbH and Maxion Wheels Germany Holding GmbH.